Unreal Engine 5 Beispielprojekt: Umsetzung eines sichtbaren Schusses per Line Trace, sowohl mittels Blueprint als auch in C++.
Ziel ist es, unabhängig von Spiellogik oder Gameplay-Mechaniken eine robuste Grundlage für Treffererkennung und Debug-Visualisierung zu schaffen.
- Blueprint: Input Action Fire, Line Trace by Channel (Visibility), Debug-Linie & Sphäre, Print String-Ausgabe.
- C++: Methode
OnFire() mit LineTraceSingleByChannel, Debug-Ausgabe und On-Screen-Meldungen.
- Kollision: Zielobjekte müssen
Visibility = Block haben, eigener Charakter wird ignoriert.
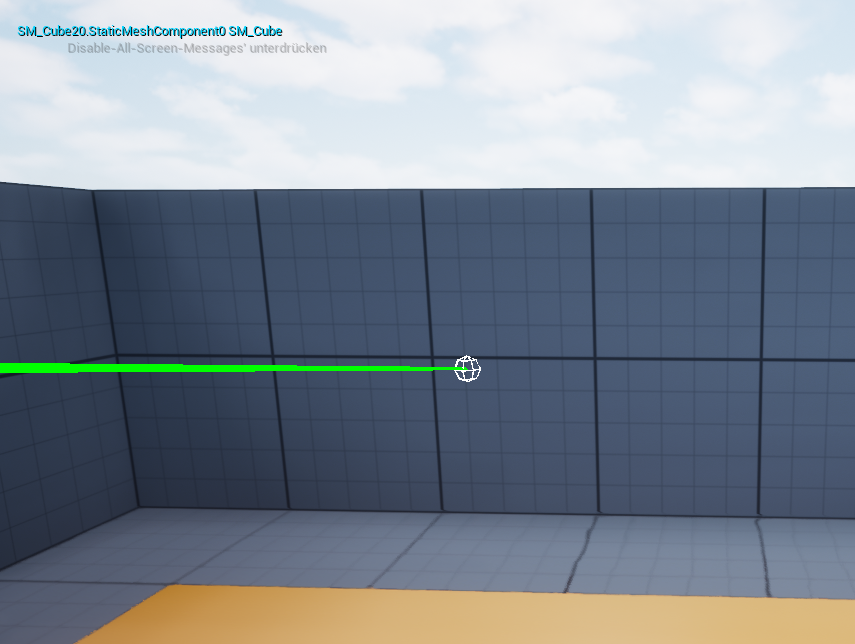
- Debug: Sofort sichtbare Linie und Aufschlagspunkt erleichtern Tests.
Dieses Beispiel zeigt, wie man in UE5 mit Blueprints und C++ arbeitet, um Schussmechaniken technisch korrekt umzusetzen.
Details
Ziel
Eine nachvollziehbare, sofort sichtbare Schuss-Simulation:
Beim Drücken der Fire-Taste feuert die Kamera einen Line Trace ab, der per Debug-Linie und -Sphäre visualisiert wird und den getroffenen Actor/Component als Text ausgibt.
1) Input anlegen
- Project Settings → Input: Action Mapping
Fire (z. B. linke Maustaste).
- Im BP_FirstPersonCharacter: Event
InputAction Fire (Pressed).
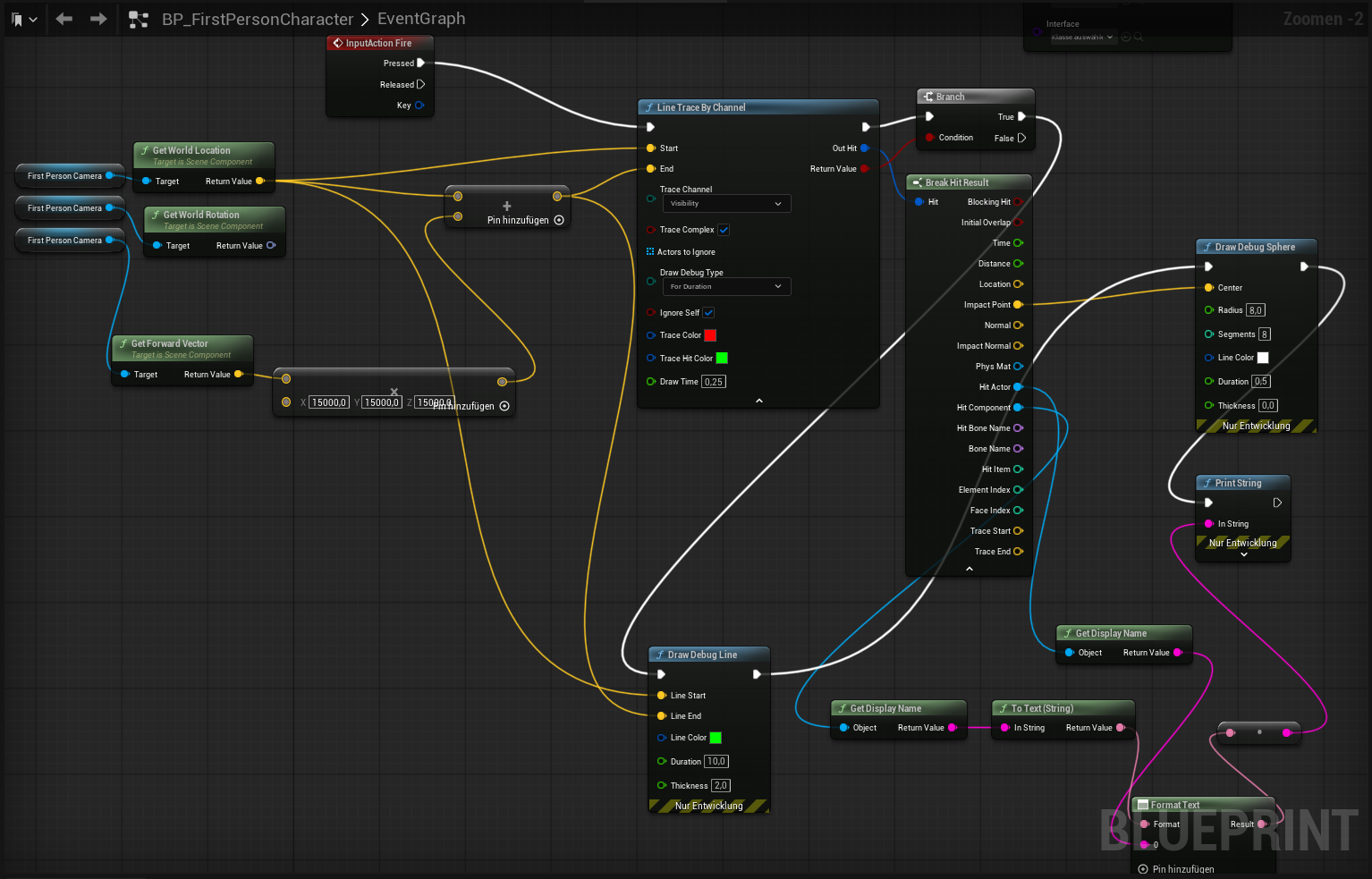
2) Blueprint-Ablauf
- Start/Ende berechnen
Start = FirstPersonCamera.GetWorldLocation()
End = Start + FirstPersonCamera.GetForwardVector() * 15000.0 (Reichweite nach Bedarf).
- Line Trace by Channel
Channel: Visibility, Ignore Self aktivieren, optional Debug Type = For Duration.
- Treffer auswerten
Break Hit Result → Actor/Component → Get Display Name → Print String.
- Visualisierung
Draw Debug Line (Start→End, Dauer z. B. 1s, Stärke 1.5) und
Draw Debug Sphere (Impact Point, Radius z. B. 10).
3) Kollision korrekt setzen
| Objekt | Einstellung |
|---|
| Treffbare Zielobjekte | Collision Enabled = Query Only, Response to Visibility = Block |
| Eigener Charakter | Ignore Self aktivieren, damit kein Treffer am eigenen Pawn ausgelöst wird |
4) C++-Alternative
Die gleiche Funktionalität in C++ implementiert: Line Trace von der Kamera, Debug-Visualisierung, On-Screen-Feedback.
Header – YourCharacter.h
#pragma once
#include "CoreMinimal.h"
#include "GameFramework/Character.h"
#include "Camera/CameraComponent.h"
#include "YourCharacter.generated.h"
UCLASS()
class YOURMODULE_API AYourCharacter : public ACharacter
{
GENERATED_BODY()
public:
AYourCharacter();
protected:
virtual void SetupPlayerInputComponent(UInputComponent* PlayerInputComponent) override;
UFUNCTION() void OnFire();
UPROPERTY(VisibleAnywhere, BlueprintReadOnly)
UCameraComponent* FirstPersonCamera = nullptr;
UPROPERTY(EditAnywhere, Category="Shooting")
float TraceRange = 15000.f;
UPROPERTY(EditAnywhere, Category="Shooting")
TEnumAsByte<ECollisionChannel> TraceChannel = ECC_Visibility;
};
Quelle – YourCharacter.cpp
#include "YourCharacter.h"
#include "DrawDebugHelpers.h"
#include "Engine/Engine.h"
AYourCharacter::AYourCharacter()
{
FirstPersonCamera = CreateDefaultSubobject<UCameraComponent>(TEXT("FirstPersonCamera"));
FirstPersonCamera->SetupAttachment(GetCapsuleComponent());
FirstPersonCamera->bUsePawnControlRotation = true;
}
void AYourCharacter::SetupPlayerInputComponent(UInputComponent* PlayerInputComponent)
{
Super::SetupPlayerInputComponent(PlayerInputComponent);
PlayerInputComponent->BindAction("Fire", IE_Pressed, this, &AYourCharacter::OnFire);
}
void AYourCharacter::OnFire()
{
if (!FirstPersonCamera) return;
UWorld* World = GetWorld();
if (!World) return;
const FVector Start = FirstPersonCamera->GetComponentLocation();
const FVector End = Start + FirstPersonCamera->GetForwardVector() * TraceRange;
FHitResult Hit;
FCollisionQueryParams Params(SCENE_QUERY_STAT(ShootTrace), false);
Params.AddIgnoredActor(this);
const bool bHit = World->LineTraceSingleByChannel(Hit, Start, End, TraceChannel, Params);
#if !(UE_BUILD_SHIPPING || UE_BUILD_TEST)
DrawDebugLine(World, Start, End, FColor::Green, false, 1.0f, 0, 1.5f);
#endif
if (bHit)
{
#if !(UE_BUILD_SHIPPING || UE_BUILD_TEST)
DrawDebugSphere(World, Hit.ImpactPoint, 10.f, 12, FColor::Cyan, false, 1.0f);
#endif
if (GEngine)
{
const FString Msg = FString::Printf(TEXT("Hit: %s / %s"),
*GetNameSafe(Hit.GetActor()), *GetNameSafe(Hit.Component.Get()));
GEngine->AddOnScreenDebugMessage(INDEX_NONE, 1.5f, FColor::Yellow, Msg);
}
}
}
5) Praktische Hinweise
- Reichweite: variabel (z. B. 5000–20000 uu je nach Projekt).
- Eigener Trace-Channel: sinnvoll, wenn
Visibility bereits stark genutzt wird.
- Debug-Ausgabe: sollte nur in Development/Editor aktiv sein, nicht im Shipping-Build.
- Editor-Test: mit Debug-Linie & -Sphäre sofort sichtbare Trefferkontrolle.